



Автор: Гаврильченко Денис
date_range 2017-07-14
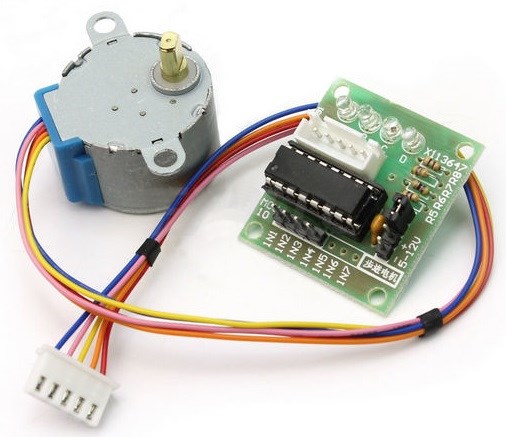
ПРИМЕНЕНИЕ 28BYJ-48-5V
Одно из множества применений 28BYJ-48-5V в любительской робототехнике – использование для привода колес шасси. Используя 28BYJ-48-5V легко получить модель электропривода робота относящегося к классу мотор-колесо. Это позволяет собирать роботов способных развернуться на месте и обладающих точным позиционированием в пространстве благодаря цифровому управлению двигателем.
Так же шаговым двигателям нашли применение в любительской фото- и видеосъемке. К примеру слайдер для камеры и астротрекер.
Используя шаговый двигатель можно собрать локатор для обнаружения препятствий движению подвижной платформы. Ультразвуковой или ИК датчик отраженного излучения благодаря работе 28BYJ-48-5V могет поворачиваться в обоих направлениях в пределах требуемого угла. Будет происходить сканирование сектора окружающего пространства. Зная положение вала мотора благодаря импульсному управлению и дистанцию до препятствия получаемую от датчика, можно сформировать картину расположения окружающих предметов.
Так как двигатель имеет редуктор, момент на валу достаточно большой , что позволяет использовать его к примеру как подьемник рулонных штор на окнах или для управления шторами или гардинами.
Немного теории
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Такой электромагнитный прибор называют шаговый 4-х фазный двигатель. Отводы обмоток соединены вместе как изображено на схеме, к ним подключен красный провод. В результате каждый из контактов четырех фаз соединен с красным проводом. Двигатель относится к однополярным благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой. Перемещение вала на шаг происходит под действием импульса тока.
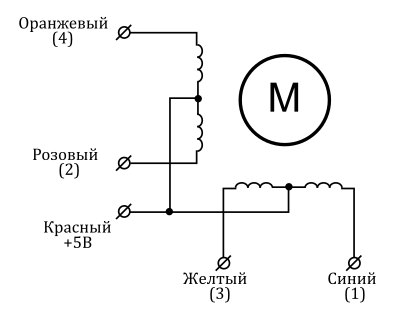
Схема фаз двигателя 28BYJ-48
Ротор мотора намагничен особым образом. На роторе 28BYJ-48-5V путем применения специальных технологий намагничивания сформировано 8 магнитов. Полюса магнитов ротора чередуются, перемещаясь мимо обмоток статора. Каждый магнит имеет 2 полюса. Происходит чередование шестнадцати полюсов. Магнитное поле фаз должно то притягивать, то отталкивать полюса магнитов. Это требование в сочетании со сменой полюсов при вращении требует смены полярности тока в фазах. Схема соединения фаз, имеющая отводы от середины обмоток позволяет использовать однополярное питание и исключить коммутационный компонент на линии питания.
Один из процессов происходящих в 28BYJ-48-5V можно представить следующим образом. Если красный провод подключен к положительному полюсу питания, то соединяя розовый или оранжевый провод двигателя с общим проводом питания, мы будем создавать магнитные поля в разных фазах одной обмотки. Поля розовой и оранжевой фаз будут направлены противоположно. При этом ток будет протекать в начале по верхней розовой фазе, а затем по нижней оранжевой. Также будет происходить формирование магнитного поля и в двух других фазах: желтой и синей.
Вращение ротора происходит за счет коммутации фаз шаг за шагом. Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
Импульс тока вызывает перемещение вала на угол обусловленный углом, занимаемым на роторе одним магнитом. Увеличение количества полюсов ротора уменьшает шаги, что позволяет нарастить точность позиционирования. Поворот вала на нужный угол под действием известного количества импульсов тока дает возможность исключить из системы управления механическим приводом контроль угла поворота.
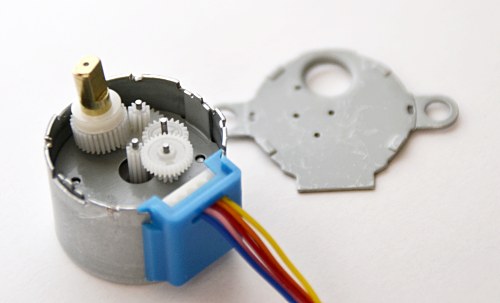
Шаговый двигатель предназначен для вращения деталей механизмов с точно задаваемой скоростью регулируемой цифровым способом. Импульсы подают на фазы в определенной последовательности. 28BYJ-48-5V содержит пластмассовый понижающий редуктор. Передаточное число редуктора двигателя 28BYJ-48-5V примерно 64:1.
Чаще всего используются два способа управления: 4 ступени импульсов и 8 ступеней. В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления. Программная библиотека Stepper для Arduino IDE использует именно такой способ управления. Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.
В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.
Более наглядно теория изложена в следующем видео о подключении 28BYJ-48-5V к Raspberry Pi.
Основные характеритики :
- Тип мотора : униполярный шаговый двигатель
- Модель двигателя : 28BYJ-48
- Номинальное рабочее напряжение: 5 В
- Подключение: 5-выводов
- Число фаз: 4
- Шаг двигателя: 5.625 °/шаг
- Передаточное отношение редуктора : 1/64
- Частота: 100 Гц
- Сопротивление по постоянному току: 50 Ом ± 7%(25°C)
- Частота под нагрузкой: > 600 Гц
- Частота на холостом ходу: > 1000 Гц
- Крутящий момент: > 34.3 мН*м (120 Гц)
- Момент самопозиционирования :> 34.3 мН*м
- Стопорящий момент: 600-1200 г*см
- Тяга: 300 г*см
- Сопротивление изоляции: > 10 МОм (500 В)
- Класс изоляции: A
- Шум : < 35 дБ (120 Гц, без нагрузки, 10 см)
- Вес: 30г
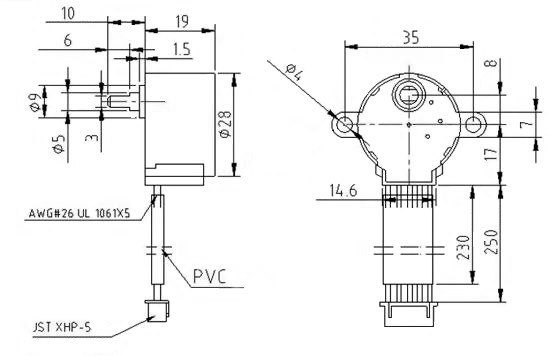
Чертеж двигателя 28BYJ-48
Модуль ULN2003 управления шаговым двигателем
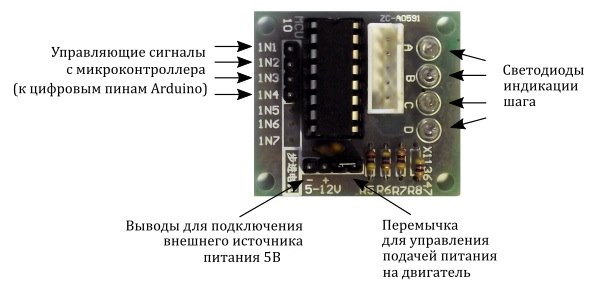
Электронный модуль содержащий микросхему ULN2003A предназначен для управления однополярным четырехфазным шаговым двигателем. Модуль принимает на себя нагрузку по силовой коммутации токов фаз мотора, защищая управляющую логическую схему от перегрузки по току и от перегрева. Например, при возрастании нагрузки на валу, в этот момент потребление тока увеличивается.
Характеристики ULN2003A:
- Ток нагрузки одного выхода предельный 500 мА
- Напряжение питания 5 или 12 В
- Размеры 28 x 28 x 20 мм
Стандартная библиотека Stepper, идущая с Arduino IDE, поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Использовать ее можно только в очень простых приложениях, в которых используется только один мотор. Применение библиотеки Stepper для управления 28BYJ-48 является не самым эффективным решением.
Есть решение получше — это использовать библиотеку Accel Stepper. Эта библиотека очень хорошо работает совместно с шаговым мотором 28BYJ-48 (мотор почти не греется), а также поддерживает ускорение, что позволяет заставить мотор вращаться быстрее. Плата драйвера имеет разьем для подключения шагового двигателя и для питания драйвера. Светодиоды отображают состояние подачи питания на фазу двигателя .


